A graph convolutional network for time series classification using recurrence plots
Hyewon Kang, Taek-Ho Lee, 이정혜 (2025) · Applied Intelligence 55:972 · DOI ↗
이 논문은 다변량 시계열 를 재귀 플롯 으로 그래프화하고, 그 그래프를 그래프 합성곱 신경망 로 분류하는 RP-GCN을 제안한다. 각 변수의 state matrix를 node feature로, recurrence plot을 adjacency matrix로 써서 시간축에서 떨어져 있어도 상태가 유사한 지점들이 직접 메시지를 주고받게 만든다. 35개 multivariate time-series classification benchmark에서 ROCKET과 비슷한 평균 F1을 보이면서도 평균 rank와 일부 추론 시간에서 강점을 보인다.
- RQ: 재귀 플롯 을 2D 이미지가 아니라 그래프의 adjacency matrix로 해석하면, 다변량 시계열 분류에서 recurrence 구조를 더 직접적으로 학습할 수 있는가?
- 방법론: 시간 지연 임베딩, 재귀 플롯, 그래프 합성곱 신경망, 시계열 분류
- 데이터: 35개 multivariate time-series classification 데이터셋. UEA archive 24개와 Baydogan archive 11개.
- 주요 발견: RP-GCN은 전체 baseline 비교에서 평균 F1 0.780, 평균 rank 2.714를 기록했다. ROCKET은 평균 F1 0.787, 평균 rank 2.743로 평균 F1은 근소하게 높지만 rank는 RP-GCN이 근소하게 앞선다. 두 모델의 F1 차이는 Wilcoxon test 기준 유의하지 않았다(p=0.828).
- 시사점: 시계열을 “순서가 있는 벡터”로만 보지 않고, 반복되는 상태 사이의 topological relation으로 표현하는 표현 학습 접근이다. 다만 공간적 관계가 중요한 PEMS-SF 같은 데이터에서는 recurrence graph만으로 부족할 수 있다.
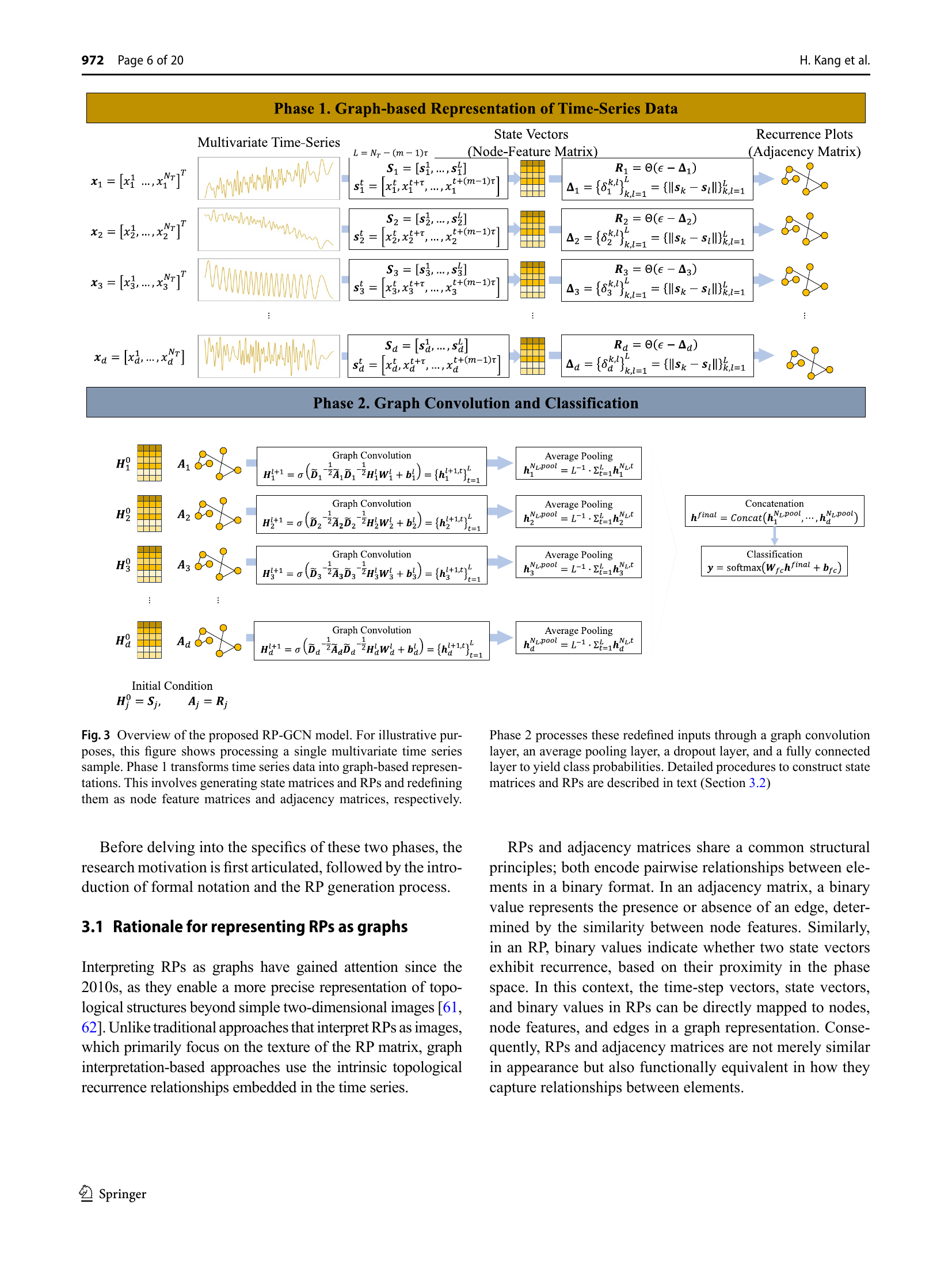
RP-GCN은 state matrix를 node feature matrix로, recurrence plot을 adjacency matrix로 사용해 multivariate time series를 graph classification 문제로 바꾼다.
요약
기존의 recurrence plot 기반 시계열 분류 은 RP를 이미지처럼 다루고 CNN으로 지역 패턴을 읽는 경우가 많았다. 이 논문은 그 해석을 바꾼다. RP의 각 원소는 두 상태 벡터가 일정 거리 안에 있는지를 나타내므로, 자연스럽게 “어떤 time point들이 서로 연결되는가”라는 그래프 구조로 읽을 수 있다. 따라서 RP를 image grid로 다루기보다 adjacency matrix로 두고 그래프 합성곱 신경망 를 적용하는 것이 논문의 핵심 발상이다.
모델은 먼저 각 변수의 시계열을 시간 지연 임베딩 으로 state matrix로 바꾸고, 변수별 recurrence plot을 만든다. 각 변수는 하나의 graph input이 되며, state matrix는 node feature, RP는 adjacency matrix가 된다. 이후 GCN layer를 통과한 graph-level representation을 concat하고 softmax classifier로 class를 예측한다. 실험은 UEA와 Baydogan archive에서 가져온 35개 multivariate time-series classification 데이터셋으로 수행했고, MLP, FCN, MLSTM-FCN, GRU-FCN, ResNet, ResCNN, InceptionTime, H-InceptionTime, TimesNet, ROCKET과 비교했다.
결과는 두 겹으로 읽어야 한다. Deep TSC 모델만 놓고 보면 RP-GCN의 평균 F1은 0.780으로 MLP 0.588, FCN 0.587, ResNet 0.578보다 크게 높고, 평균 rank도 1.343으로 가장 낮다. 전체 baseline에 ROCKET을 포함하면 ROCKET의 평균 F1이 0.787로 RP-GCN보다 약간 높지만, 평균 rank는 RP-GCN 2.714, ROCKET 2.743로 RP-GCN이 근소하게 앞선다. 논문은 두 모델의 성능 차이가 통계적으로 유의하지 않으며, 데이터셋별 승패 순위의 상관도도 낮아 두 접근이 상호보완적일 수 있다고 해석한다.
핵심 결과
| 비교 | 원문 기준 결과 | 해석 |
|---|---|---|
| Deep TSC baseline 대비 | RP-GCN 평균 F1 0.780, 평균 rank 1.343 | MLP, FCN, ResNet, InceptionTime 계열보다 전반적으로 강함 |
| 전체 baseline 비교 | RP-GCN 평균 F1 0.780, 평균 rank 2.714 | ROCKET의 평균 F1 0.787보다 낮지만, 평균 rank는 근소하게 더 좋음 |
| RP-GCN vs ROCKET | Wilcoxon p=0.828 | 전체 F1 차이는 유의하지 않음 |
| 추론 시간 | Wafer: RP-GCN 1.67s vs ROCKET 30.34s, Handwriting: RP-GCN 1.02s vs ROCKET 31.19s | 일부 데이터셋에서 RP-GCN의 추론 시간이 크게 짧음 |
| RP-CNN ablation | NATOPS에서 RP-CNN F1 0.707, RP-GCN F1 0.945 | RP를 image가 아니라 graph로 읽는 설계의 이점을 보여주는 사례 |
| 약점 | PEMS-SF에서 부진 | 도로 센서의 명시적 공간 관계를 recurrence graph가 충분히 담지 못할 수 있음 |
논문은 recurrence threshold를 시계열 표준편차의 10%로 두는 설정이 대체로 가장 좋았다고 보고한다. 너무 낮은 threshold는 graph를 지나치게 sparse하게 만들고, 너무 높은 threshold는 거의 모든 node를 연결해 구분력을 떨어뜨린다.
방법론 노트
시계열 에 대해 시간 지연 임베딩 은 길이 의 state vector를 만든다.
각 state vector 사이의 거리가 threshold 이하이면 recurrence가 발생한다.
은 이 논문에서 graph adjacency matrix가 된다. 변수 에 대한 GCN layer는 self-loop를 더한 adjacency 와 degree matrix 를 사용한다.
여러 변수의 graph representation은 pooling 후 concat된다.
방법론적으로 중요한 지점은 RP가 단순한 이미지가 아니라 recurrence relation의 adjacency라는 점이다. CNN은 RP의 지역적 pixel pattern을 읽지만, GCN은 recurrence로 연결된 node들의 feature를 직접 aggregate한다. 그래서 시간적으로 멀리 떨어진 상태라도 유사하면 같은 graph neighborhood 안에서 학습된다.
연구 계보
이 논문은 이정혜 의 3기 SNU TEMEP 연구에서 그래프 머신러닝 과 시계열 분석 가 만나는 지점에 놓인다. 같은 시기 TMF-GNN: Temporal matrix factorization-based graph neural network for multivariate time series forecasting with missing values 이 결측 다변량 시계열 예측에서 GNN을 사용하고, Inter-country trade similarity graph-based long short-term memory for port throughput prediction 가 무역 유사도 그래프를 항만 물동량 예측에 연결했다면, 이 논문은 recurrence plot 자체를 graph construction 장치로 재해석한다.
선행 연구와의 관계는 비교적 명확하다. RP를 시계열 이미지로 바꿔 CNN에 넣는 흐름, raw time series를 deep TSC 모델에 넣는 흐름, visibility graph나 Series2Graph처럼 시계열을 graph로 바꾸는 흐름을 이어받는다. 이 논문은 그중 RP의 binary recurrence matrix가 이미 adjacency matrix에 가깝다는 점을 전면화한다.
See also
인접 그래프
- 인물 3
- 방법론 7
- 개념 2
- 주제 2
- 수록처 1
- 분류 1
- 논문 2